



















100
Position control
4.5.5 Stop operation under position control (Pr.464, Pr.535)
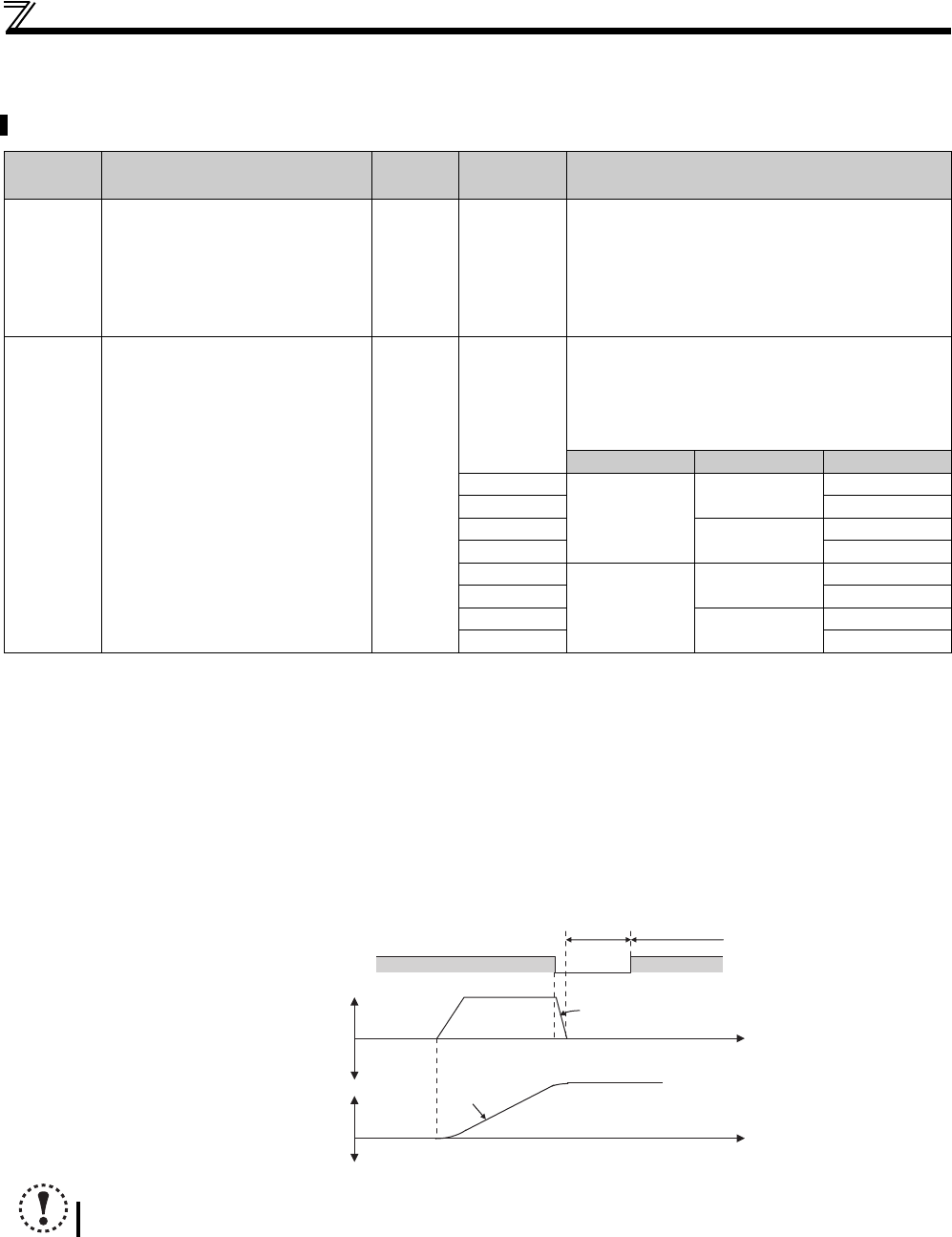
(1) Sudden stop (X87 signal)
When the X87 signal (position control sudden stop signal) is assigned to the input terminal, the operation stops according
to the deceleration time slope set by Pr.464 Position control sudden stop deceleration time by turning OFF the signal
(normally closed input). However, when the deceleration time set in Pr.464 Position control sudden stop deceleration time is
longer than that set by the current position control command, the deceleration time slope set by the current position
control command is applied. After the operation is stopped, turning ON the X87 signal starts position control again. To
input the X87 signal, set "87" in any of Pr.178 to Pr.184 (input terminal function selection) to assign the function to a terminal.
When the ones digit of the set value in Pr.535 Position control terminal input selection is "0", the normally open input is
applied and the operation is stopped by turning ON the X87 signal.
While position control is being performed, the operation can be stopped via input terminals.
Parameter
number
Name
Initial
value
Setting
range
Description
464
Position control sudden stop
deceleration time
0.01s 0.01 to 360s
Set the deceleration time when the operation is
stopped by inputting the sudden stop signal, forward
stroke end signal, or reverse stroke end signal.
Set the basis of deceleration time in Pr.20 Acceleration/
deceleration reference speed. Set the speed change time
from Pr.20 to "stop" as the deceleration time.
535
Position control terminal
input selection
0
The input logic can be selected for X87, LSP, and LSN.
Normally open: The operation is stopped when the
contact between SD and each signal is closed.
Normally closed: The operation is stopped when the
contact between SD and each signal is opened.
LSN LSP X87
0
Normally open
Normally open
Normally open
1 Normally closed
10
Normally closed
Normally open
11 Normally closed
100
Normally closed
Normally open
Normally open
101 Normally closed
110
Normally closed
Normally open
111 Normally closed
The above parameters can be set when Pr.160 Extended function display selection = "0". (Refer to page 182)
NOTE
The operation is inactive under speed control.
X87 signal
(normally closed input)
ON ON
Speed command
0
Position
[before electronic gear]
0
Slope set by Pr.464
Stop (servo lock)
Restart
available
Position
command
Time
Time
Restart
unavailable