


















3. Setup
3 - 26
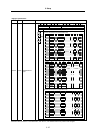
High-gain specifications
No. Abbrev. Parameter name Explanation
Setting range
(Unit)
SV018 PIT*
Ball screw pitch Set the ball screw pitch. Set to "360" for the rotary axis.
1 to 32767
(mm/rev)
In the case of the semi-closed loop control
Set the same value as SV020 (RNG2).
(Refer to the explanation of SV020.)
1 to 9999
(kp/rev)
In the case of the full-closed loop control
Set the number of pulses per ball screw pitch.
Detector model name Resolution SV019 setting
OHE25K-ET, OHA25K-ET 100,000 (p/rev) 100
OSE104-ET,OSA104-ET 100,000 (p/rev) 100
OSE105-ET,OSA105-ET 1,000,000 (p/rev) 1000
Relative position
detection scale
Refer to detector
specification manual
PIT/Resolution
(
µm)
AT41 (Mitsutoyo) 1 (µm/p)
The same as
SV018 (PIT)
FME type, FLE type
(Futaba)
Refer to detector
specification manual
PIT/Resolution
(
µm)
MP type (Mitsubishi
Heavy Industries)
Refer to detector
specification manual
PIT/Resolution
(
µm)
AT342 (Mitsutoyo) 0.5 (µm/p)
Twice as big as
SV018 (PIT)
AT343 (Mitsutoyo) 0.05 (µm/p)
20 times as big
as SV018 (PIT)
AT543 (Mitsutoyo)
0.05 (µm/p)
20 times as big as
SV018 (PIT)
LC191M (Heidenhain) 0.1, 0.05 (µm/p)
PIT/Resolution
(
µm)
LC491M (Heidenhain) 0.05 (µm/p)
PIT/Resolution
(
µm)
RCN223(Heidenhain) 8,000,000(p/rev) 8000
RCN723(Heidenhain) 8,000,000(p/rev) 8000
MDS-B-HR - PIT/scale(μm)
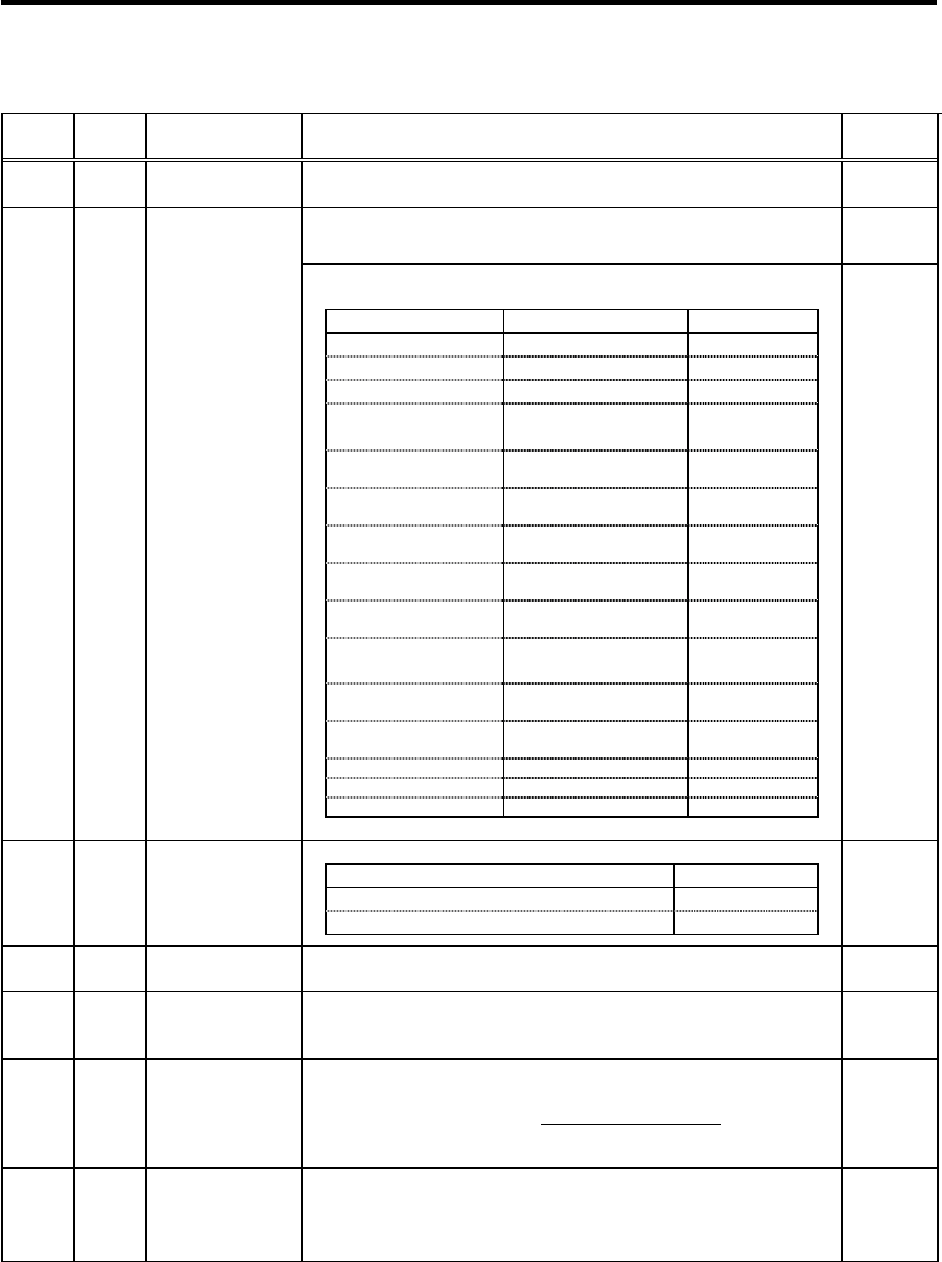
SV019 RNG1*
Position detector
resolution
1 to 30000
(kp/pit)
Set the number of pulses per one revolution of the motor end detector.
Detector model name SV020 setting
OSE104, OSA104 100
OSE105, OSA105 1000
SV020 RNG2*
Speed detector
resolution
1 to 9999
(kp/rev)
SV021 OLT
Overload detection
time constant
Set the detection time constant of Overload 1 (Alarm 50).
Set to "60" as a standard. (For machine tool builder adjustment.)
1 to 999
(s)
SV022 OLL
Overload detection
level
Set the current detection level of Overload 1 (Alarm 50) in respect to the
stall (rated) current.
Set to "150" as a standard. (For machine tool builder adjustment.)
110 to 500
(Stall [rated]
current %)
Set the excessive error detection width when servo ON.
Rapid traverse rate
(mm/min)
<Standard
setting value> OD1=OD2=
60
× PGN1
÷ 2 (mm) SV023 OD1
Excessive error
detection width
during servo ON
When "0" is set, the excessive error detection will not be performed.
0 to 32767
(mm)
SV024 INP
In-position
detection width
Set the in-position detection width.
Set the accuracy required for the machine.
The lower the setting is, the higher the positioning accuracy gets,
however, the cycle time (setting time) becomes longer. The standard
setting is "50".
0 to 32767
(µm)
Parameters with an asterisk * in the abbreviation, such as PC1*, are validated with the NC power turned ON again.