


















3. Setup
3 - 41
(3) Detector related parameters
(a) For semi-closed loop control
For control using only the motor end detector, specify the settings shown in the table below. For
speed and current synchronous control, refer to section "2-4-3 Connecting the synchronous control
system".
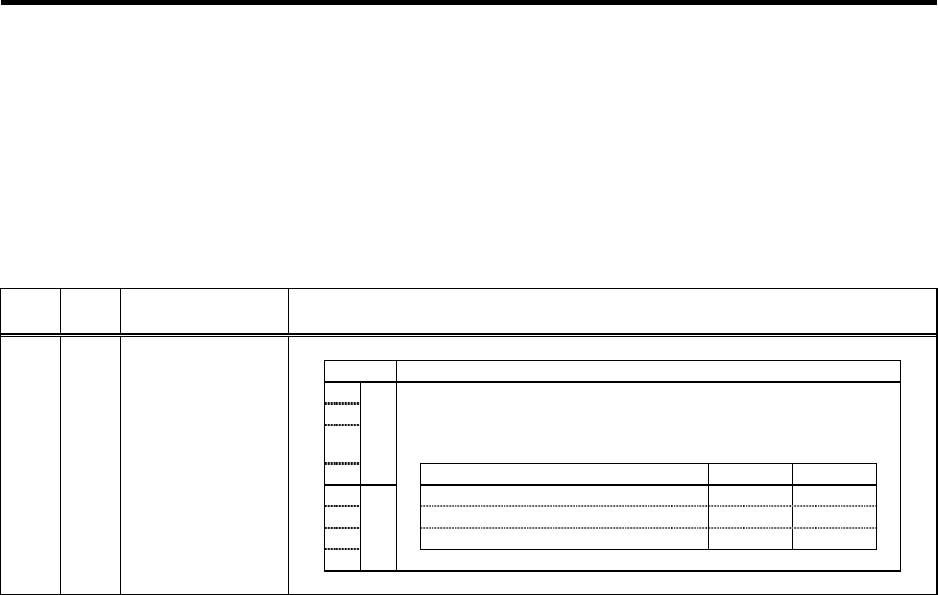
Setting for semi-closed loop control
Standard specifications
No.
Abbr
ev.
Parameter name
Explanation
bit Details
8
9
A
ent
Set the detector type.
Set the position detector type for “pen”, and the speed detector type
for “ent”. In the case of the semi-closed loop control, set the same
value for “pen” and “ent”.
B
Detector model pen setting ent setting
C OSE104 0 0
D OSA104 1 1
E
pen
OSE105, OSA105 2 2
F
SV025 MTYP*
Motor/Detector type
Parameters with an asterisk * in the abbreviation, such as PC1*, are validated with the NC power turned ON again.
(b) For full-closed loop control
Some parameter settings must be specified in order to use the machine end detector. These
settings are determined by type or the installation conditions of the linear scale and the ball screw
end detector.
[1] The SV025/bit8 to B (ent) setting must be specified according to the motor end detector
specifications, in the same manner as for semi-closed loop control. For current synchronous
control, however, refer to section "2-4-3 Connecting the synchronous control system".
[2] If the polarities of the motor end detector and the machine end detector do not match, specify
SV017/bit4=1 setting.
[3] To use AT342, specify SV027/bit6=1 setting.
[4] To use the MP scale, specify SV017/bit8 setting in accordance with the scale specifications.
For absolute position control, specify SV017/bit9=1 setting.
[5] For ABZ phase pulse output type relative position detection scale with constant Z-phase
detection position without regard to the travel direction, specify SV027/bit6=1 setting. Z-phase
detection occurs as follows: Plus-direction travel: Rising edge detection, Minus-direction
travel: Falling edge detection
[6] For machine end absolute position control at the rotation axis, specify SV081/bit1=1 setting.
[7] For speed and current synchronous control, refer to "2-4-3 Connecting the synchronous
control system".