



















4. Servo Adjustment
4 - 19
4-3-4 Improvement of characteristics during acceleration/deceleration
(1) SHG control (option function)
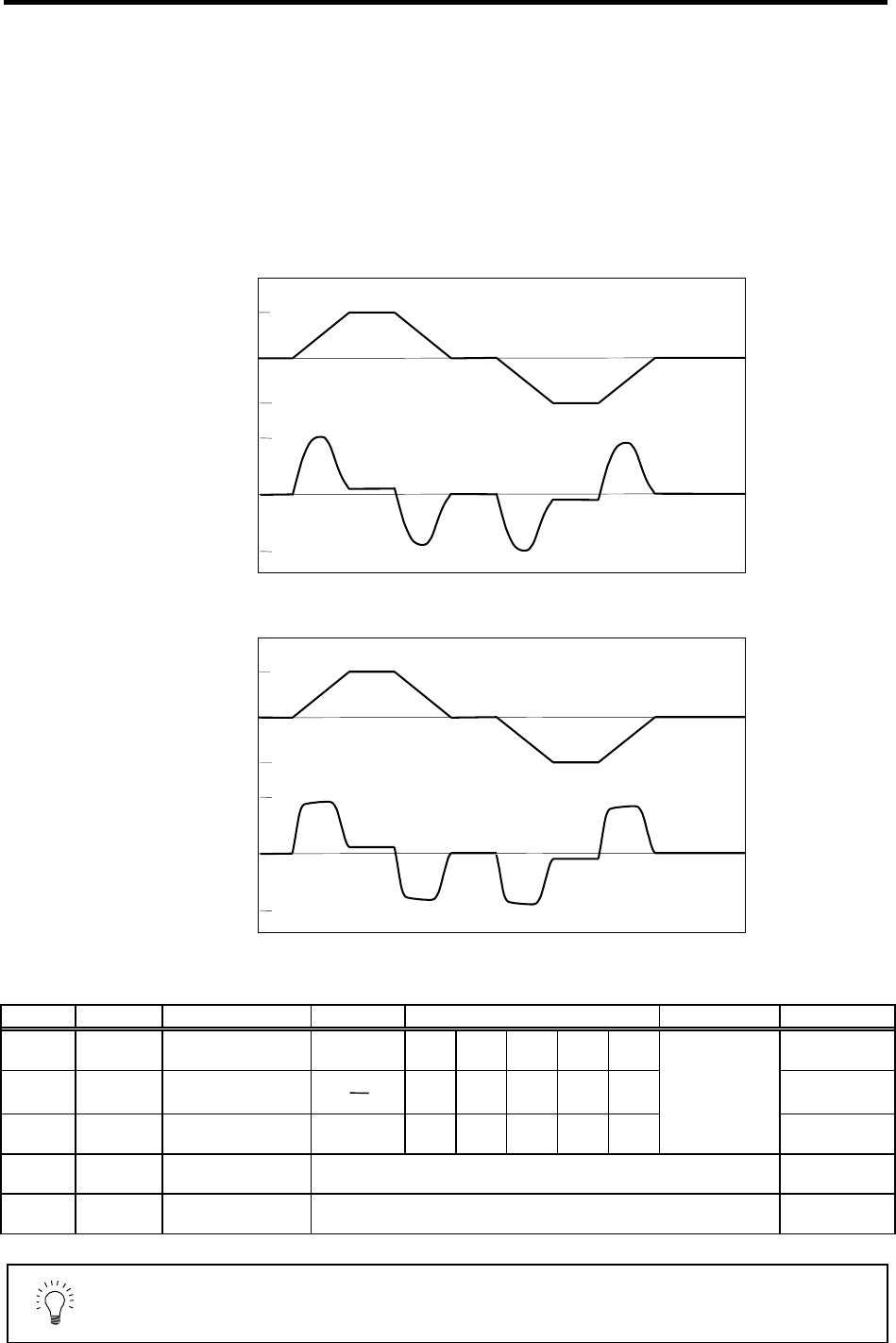
Because SHG control has a smoother response during acceleration/deceleration than
conventional position controls, the acceleration/deceleration torque (current FB) has more ideal
output characteristics (A constant torque is output during acceleration/deceleration.) The peak
torque is kept low by the same acceleration/deceleration time constant, enabling the time constant
to be shortened.
Refer to item "(3) SHG control" in section "4-2-3 Position loop gain" for details on setting SHG
control.
No. Abbrev. Parameter name Setting ratio Setting example Explanation Setting range
SV003
(SV049)
PGN1
(PGN1sp)
Position loop gain 1 1 23 26 33 38 47 1 to 200
SV004
(SV050)
PGN2
(PGN2sp)
Position loop gain 2
8
3
62 70 86 102 125 0 to 999
SV057
(SV058)
SHGC
(SHGCsp)
SHG control gain 6 140 160 187 225 281
Always set with a
combination of
these three
parameters.
0 to 1200
SV008 VIA
Speed loop lead
compensation
Set 1900 as a standard value during SHG control. 1 to 9999
SV015 FFC
Acceleration rate
feed forward gain
Set 100 as a standard value during SHG control. 0 to 999
POINT
SHG control is an option function. If the option is not set in the NC, alarm 37 (at
power ON), or warning E4 and error parameter No. 104 (2304 for M60S/E60
Series NC) will be output.
0
0
3000
200
-200
-3000
0
0
3000
200
-200
-3000
Acceleration/deceleration characteristics during conventional control
Speed command
(r/min)
Current FB
(stall current%)
Time
Time
Acceleration/deceleration characteristics during SHG control
Speed command
(r/min)
Current FB
(stall current %)
Time
Time