



















4. Servo Adjustment
4 - 38
No. Abbrev. Parameter name Explanation Setting range
SV055 EMGx
Max. gate off delay
time after
emergency stop
Set a length of time from the point when the emergency stop is input to
the point when READY OFF is compulsorily executed.
Normally, set the same value as the absolute value of SV056.
In preventing the vertical axis from dropping, the gate off is delayed for the
length of time set in SV048 if SV055’s value is smaller than that of SV048.
0 to 20000
(ms)
SV056 EMGt
Deceleration time
constant at
emergency stop
In the vertical axis drop prevention time control, set the time constant
used for the deceleration control at emergency stop. Set a length of time
that takes from rapid traverse rate (rapid) to stopping.
Normally, set the same value as the rapid traverse
acceleration/deceleration time constant.
When executing the synchronous operation, put the minus sign to the
settings of both of the master axis and slave axis.
-20000 to
20000 (ms)
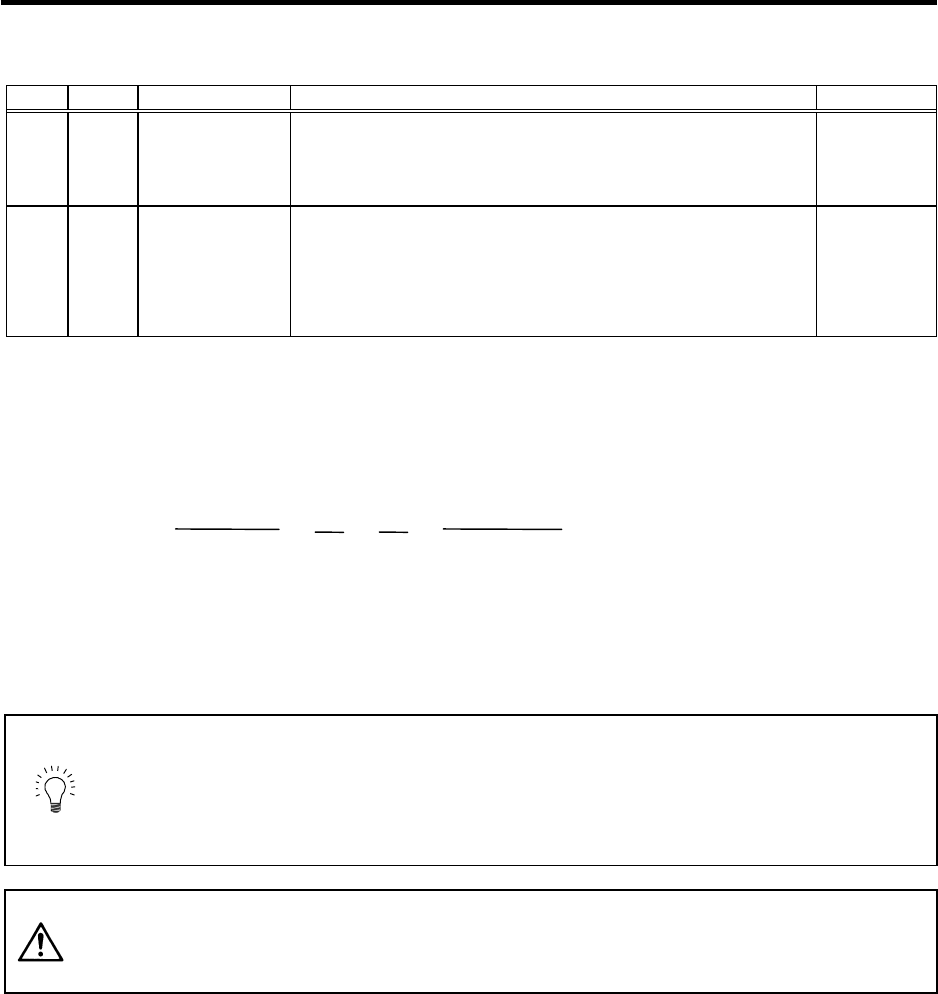
(2) Deceleration control stop distance
The stopping distance LEMG when the motor is stopped with deceleration control during an
emergency stop can be approximated with the following expression. Note that the value will be
higher than this if the current is limited during deceleration.
L
EMG =
F
PGN1 × 60
+
1
2
×
F
60
×
F × EMGt
ra
p
id × 1000
(mm)
F : Feedrate during emergency stop (mm/min)
rapid : Rapid traverse rate (mm/min)
PGN1 : Position loop gain 1 (SV003) (rad/s)
EMGt : Deceleration time constant for emergency stop (SV056) (ms)
POINT
1. Deceleration control will not take place when a servo alarm, for which the
stopping method is dynamic, occurs. The motor will stop with dynamic
braking regardless of the parameter setting.
2. If the power fails and the deceleration time constant is set to a relatively long
time, the braking method may change from deceleration control to dynamic
braking due to a drop in the bus voltage in the drive unit.
CAUTION
If the deceleration control time constant (EMGt) is set to a value longer than the
acceleration/deceleration time constant, the overtravel point (stroke end point)
may be exceeded.
Take care as the axis could collide with the tool end.