



















4. Servo Adjustment
4 - 7
(2) Setting the position loop gain for spindle synchronous control
During spindle synchronous control (synchronous tapping control, etc.), there are three sets of
position loop gain parameters besides the normal control.
No. Abbrev. Parameter name Explanation Setting range
SV049 PGN1sp Position loop gain 1
in spindle
synchronous control
Set 15 as a standard. 1 to 200
(rad/s)
SV050 PGN2sp Position loop gain 2
in spindle
synchronous control
Set 0 as a standard.
(For SHG control)
0 to 999
SV058 SHGCsp SHG control gain in
spindle synchronous
control
Set 0 as a standard.
(For SHG control)
Set the same parameter as the
position loop gain for the spindle
synchronous control.
0 to 1200
CAUTION
Always set the same value for the position loop gain between the spindle and
servo synchronous axes.
(3) SHG control (option function)
If the position loop gain is increased or feed forward control (NC function) is used to shorten the
settling time or increase the precision, the machine system may vibrate easily.
SHG control changes the position loop to a high-gain by stably compensating the servo system
position loop through a delay. This allows the settling time to be reduced and a high precision to be
achieved. (SHG: Smooth High-Gain)
(Feature 1) When the SHG control is set, even if PGN1 is set to the same value as the
conventional gain, the position loop gain will be doubled.
(Feature 2) The SHG control response is smoother than conventional position control during
acceleration/deceleration, so the gain can be increased further with SHG control
compared to the conventional position control.
(Feature 3) With SHG control, a high gain is achieved so a high precision can be obtained during
contour control.
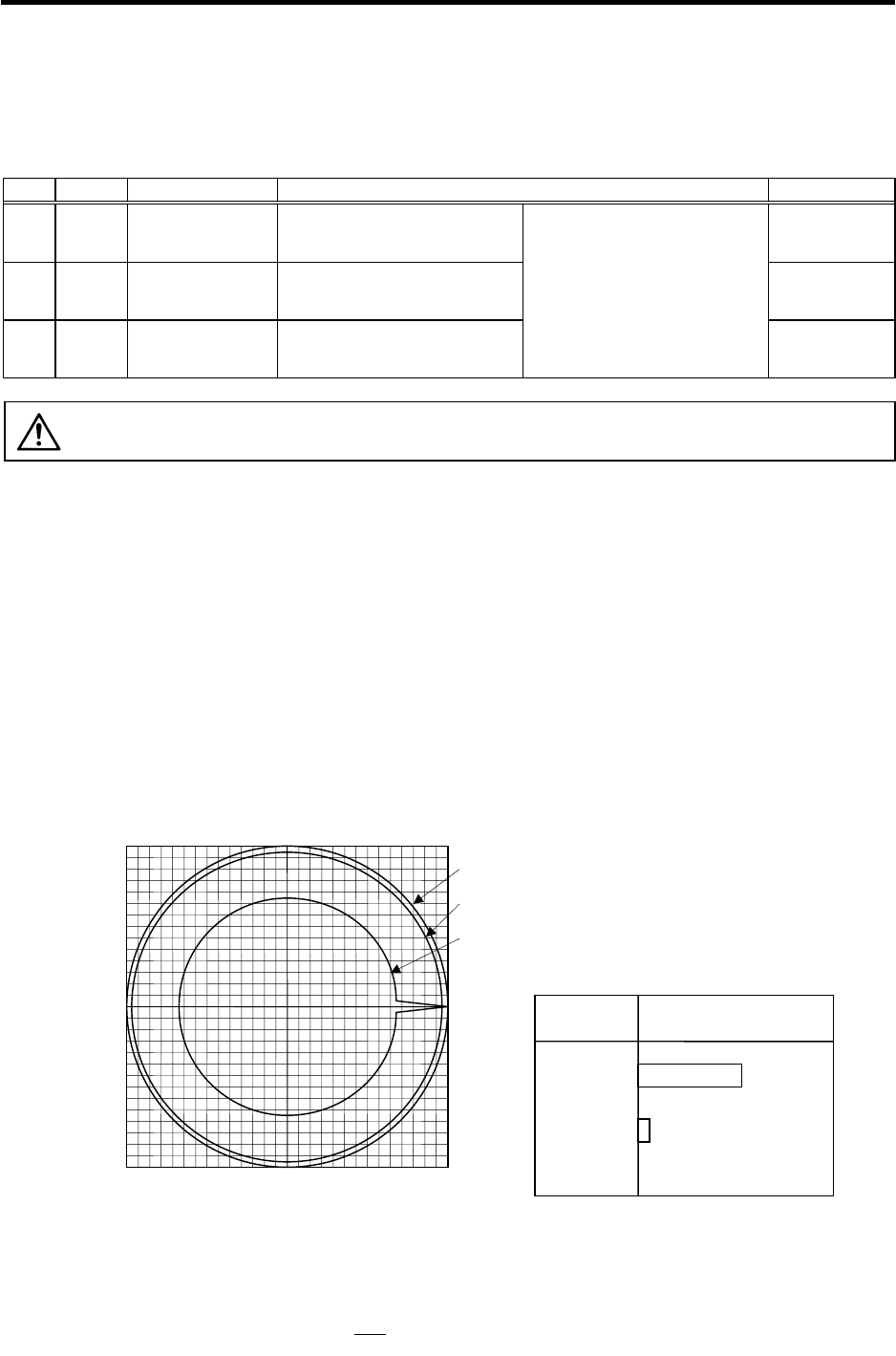
The following drawing shows an example of the improvement in roundness
characteristics with SHG control.
Shape error characteristics
During SHG control, PGN1, PGN2 and SHGC are set with the following ratio.
PGN1 : PGN2 : SHGC = 1 :
8
3
: 6
(F=3000mm/min, ERROR=5.0µm/div)
-50.0 50.00.0
0.0
-50.0
50.0
[1] : Commanded path
[2] : SHG control (PGN1=47)
[3] : Conventional control (PGN1=33)
Conventional
control
SHG control
Control
method
Roundness error (
µ
m)
2.5
22.5
<Effect>