















3. Setup
3 - 87
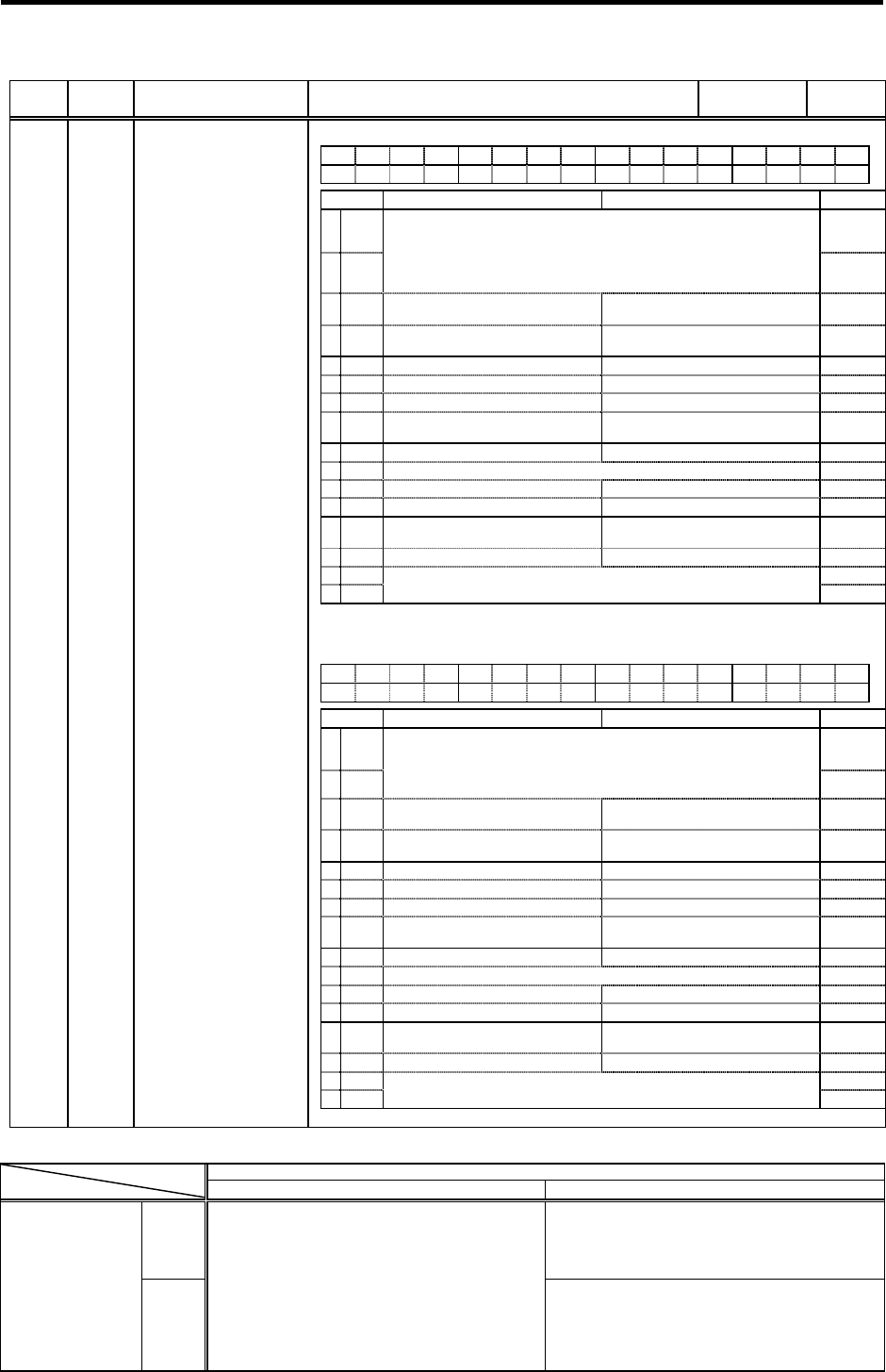
No. Abbr. Parameter name Details
Setting range
(Unit)
Standard
setting
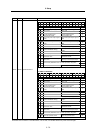
<For MDS-C1-SP>
FEDCBA98765 4 3 2 10
ostp orze ksft gchg ips2 zdir vg8x mdir fdir oscl pyfx dmin odi2 odi1
bit Meaning when set to 0 Meaning when set to 1 Standard
0 odi1 0
1 odi2
Orientation rotation direction
, C-axis control zero point return
direction (only SPX, SPHX)
00: Previous (the direction in which the motor has so far rotated under
speed control)
01: Forward rotation
10: Backward rotation 11: Prohibited
0
2dmin
Orientation completion advance
invalid
Orientation completion advance
valid
0
3pyfx
Excitation min. (50%) during
orientation servo lock invalid
Excitation min. (50%) during
orientation servo lock valid
0
4 oscl Indexing speed clamp invalid Indexing speed clamp valid 0
5 fdir Spindle end detector polarity: + Spindle end detector polarity: – 0
6 mdir Magnetic sensor polarity: + Magnetic sensor polarity: – 0
7vg8x
Speed gain *1/8 during torque limit
valid
Speed gain *1/8 during torque limit
invalid
0
8 0
9 zdir This is used by Mitsubishi. Set to "0" unless particularly designated. 0
A ips2 2nd orientation completion invalid 2nd orientation completion valid 0
B 0
Cgchg
Gain changeover during orientation
invalid
Gain changeover during orientation
valid
0
D ksft Orientation virtual target shift invalid Orientation virtual target shift valid 0
Eorze 0
Fostp
This is used by Mitsubishi.
Set to "0" unless particularly designated.
0
(Note 1) Set 0 if there is no particular explanation for the bit.
SP097 SPECO* Orientation specification
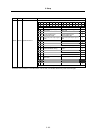
<For MDS-C1-SPH>
FEDCBA98765 4 3 2 10
ostp orze ksft gchg tlmp ips2 zdir tlet vg8x mdir fdir oscl pyfx dmin odi2 odi1
bit Meaning when set to 0 Meaning when set to 1 Standard
0 odi1 0
1 odi2
Orientation rotation direction
00: Previous (the direction in which the motor has so far rotated under
speed control)
01: Forward rotation
10: Backward rotation 11: Prohibited
0
2dmin
Orientation completion advance
invalid
Orientation completion advance
valid
0
3pyfx
Excitation min. (50%) during
orientation servo lock invalid
Excitation min. (50%) during
orientation servo lock valid
0
4 oscl Indexing speed clamp invalid Indexing speed clamp valid 0
5 fdir Spindle end detector polarity: + Spindle end detector polarity: – 0
6 mdir Magnetic sensor polarity: + Magnetic sensor polarity: – 0
7vg8x
Speed gain *1/8 during torque limit
valid
Speed gain *1/8 during torque limit
invalid
0
8 tlet Turret indexing invalid Turret indexing valid 0
9 zdir This is used by Mitsubishi. Set to "0" unless particularly designated. 0
A ips2 2nd orientation completion invalid 2nd orientation completion valid 0
B tlmp Turret indexing 1-deg unit Turret indexing 0.1-deg unit 0
Cgchg
Gain changeover during orientation
invalid
Gain changeover during orientation
valid
0
D ksft Orientation virtual target shift invalid Orientation virtual target shift valid 0
Eorze 0
Fostp
This is used by Mitsubishi.
Set to "0" unless particularly designated.
0
Parameters with an asterisk * in the abbreviation, such as OSP*, are validated with the NC power turned ON again.
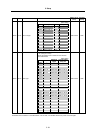
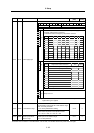
Orientation completion advance (SP097/bit2)
0 (Invalid) 1 (Valid)
0
(Invalid)
In SP004 (OINP) width:
Orientation completion signal (ORCF)
Control output 4/bit4=1
2nd orientation completion signal (ORF2)
Control output 4/bitF=Invalid
2nd orientation
completion signal
(SP097/bitA)
1
(Valid)
In SP004 (OINP) width:
Orientation completion signal (ORCF)
Control output 4/bit4=1
2nd orientation completion signal (ORF2)
Control output 4/bitF=Invalid
In SP101 (DINP) width:
Orientation completion signal (ORCF)
Control output 4/bit4=1
In SP004 (OINP) width:
2nd orientation completion signal (ORF2)
Control output 4/bitF=1