



















4. Servo Adjustment
4 - 34
4-4-2 Speed loop delay compensation
Generally, the tool end position follows the operation later than the motor end position. With full closed
loop position loop control, the tool end position is used for position feedback, so the motor end position
could advance too far and cause the tool end position to overshoot easily. Speed loop delay
compensation suppresses overshooting by weakening the speed loop PI control (weakening advance
compensation = delaying). If the compensation is too large and PI control is weakened too far, the
positioning time could increase, or the position droop will remain when the motor is stopped.
<Adjustment method>
[1] Set the servo function selection 1 (SV027: SSF1)/bit1, bit0 to 10. (Select delay compensation
changeover type 2)
[2] Set the axis unbalance torque to the torque offset (SV032: TOF). (Refer to "4-3-5 (1) Unbalance
torque and frictional torque" for details on measuring the unbalance torque.)
[3] Observe the position droop waveform, and confirm the overshooting. Increase SV007 (VIL) in
increments of 5, and adjust so that the overshooting is improved. If set too high, the position
droop will remain when the axis is stopped.
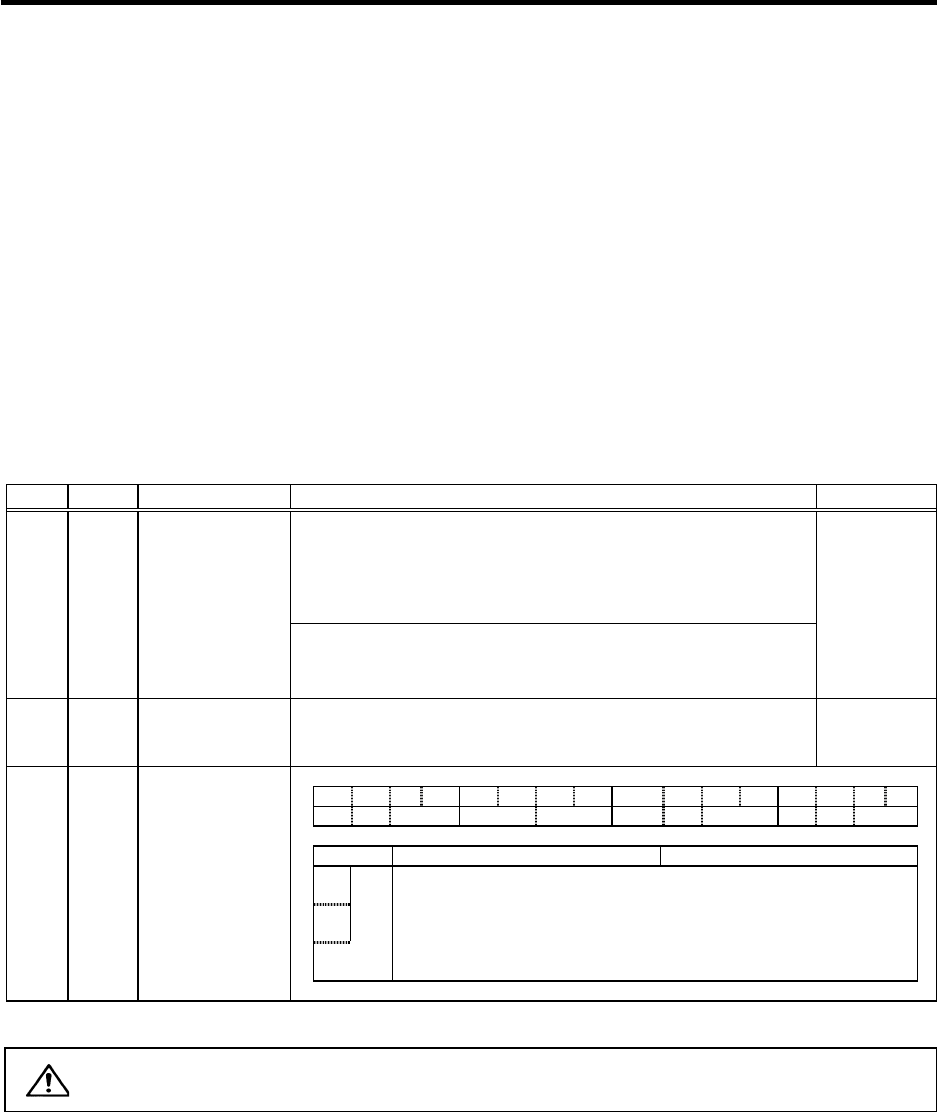
No. Abbrev. Parameter name Explanation Setting range
Set this when the limit cycle occurs in the full-closed loop, or overshooting
occurs in positioning.
Select the control method with SV027 (SSF1)/bit1, 0 (vcnt).
Normally, use "Changeover type 2".
When you set this parameter, make sure to set the torque offset SV032
(TOF). When not using, set to "0".
SV007 VIL
Speed loop delay
compensation
Changeover type 2 When SV027 (SSF1)/ bit1, 0 (vcnt)=10
The delay compensation control works when the command from the
NC is "0" and the position droop is "0". Overshooting or the limit cycle
that occurs during pulse feeding or positioning can be suppressed.
0 to 32767
SV032 TOF Torque offset
Set the unbalance torque of vertical axis and inclined axis.
-100 to 100
(Stall [rated]
current %)
SV027 SSF1 Servo function
selection 1 F E D C B A 9 8 7 6 5 4 3 2 1 0
aflt zrn2 afse ovs lmc omr zrn3 vfct upc vcnt
bit Meaning when "0" is set Meaning when "1" is set
0
Set the execution changeover type of the speed loop delay
compensation.
1
vcnt
00:
Delay compensation changeover
invalid
10: Delay compensation
changeover type 2
01:
Delay compensation changeover
type 1
11: Setting prohibited
CAUTION
The position droop will remain if SV007 is set too high.