



















4. Servo Adjustment
4 - 17
(4) Disturbance observer
The disturbance observer can reduce the effect caused by disturbance, frictional resistance or
torsion vibration during cutting by estimating the disturbance torque and compensating it. It also is
effective in suppressing the vibration caused by speed leading compensation control.
<Setting method>
[1] Set SV082/bit7=1.
[2] Adjust VGN1 to the value where vibration does not occur, and then lower it 10 to 20%.
[3] Set the load inertia scale (SV037: JL) with a percentage in respect to the motor inertia of the
total load inertia.
(Refer to next page for measuring the motor shaft conversion load inertia ratio.)
[4] Set the observer filter band (observer pole) in the disturbance observer filter frequency
(SV043: OBS1), and suppress the high frequency disturbance estimate to suppress the
vibration. Set "100" as a standard.
[5] Set the observer gain in disturbance observer gain (SV044: OBS2). The disturbance observer
will function here for the first time. Set 100 first, and if vibration does not occur, increase the
setting by 50 at a time to increase the observer effect.
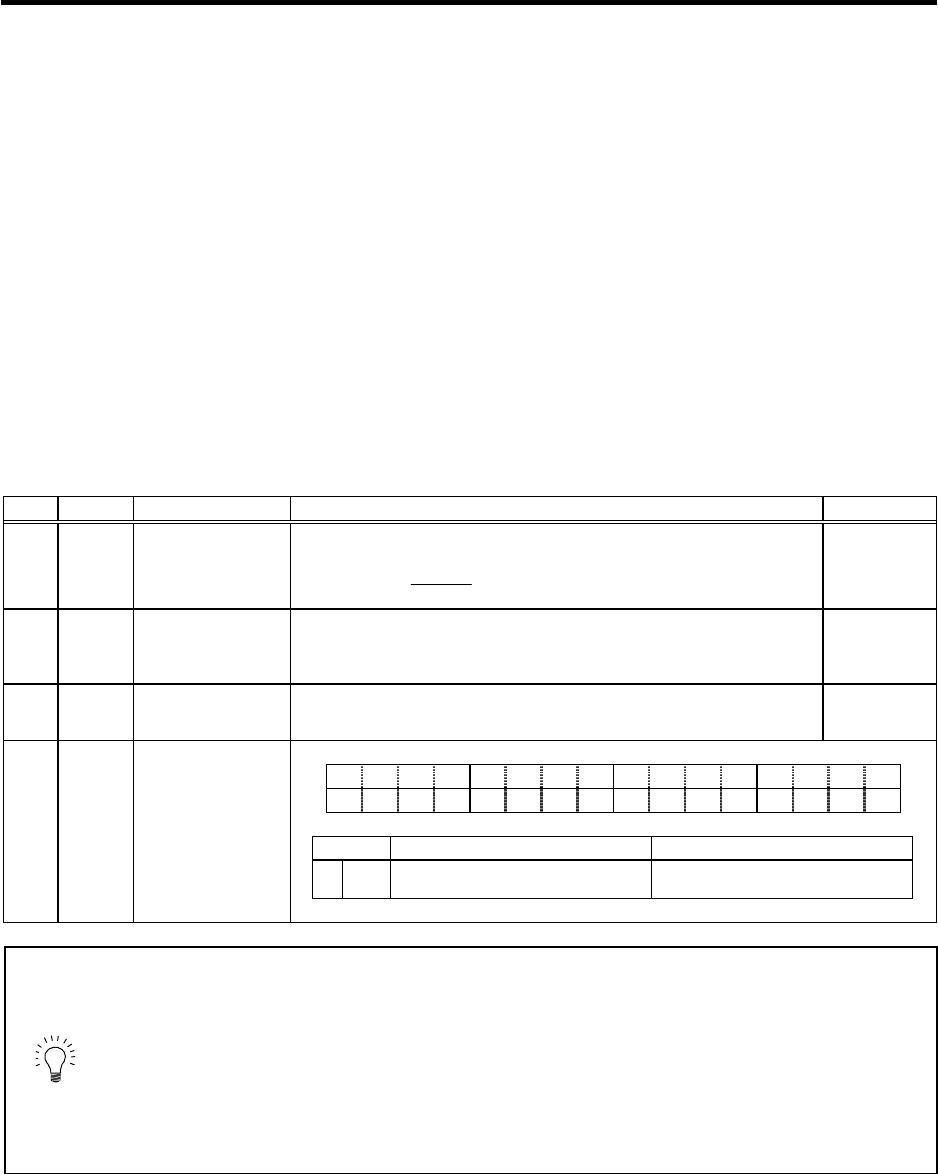
No. Abbrev. Parameter name Explanation Setting range
SV037 JL Load inertia scale Set "the motor inertia + motor axis conversion load inertia" in respect to the
motor inertia.
SV037 (JL) =
Jl + Jm
Jm
× 100
Jm : Motor inertia
Jl : Motor axis conversion load inertia
0 to 5000
(%)
SV043 OBS1
Disturbance
observer filter
frequency
Set the disturbance observer filter band.
Set to "100" as a standard.
To use the disturbance observer, also set SV037 (JL) and SV044 (OBS2).
When not using, set to "0".
0 to 1000
(rad/s)
SV044 OBS2
Disturbance
observer gain
Set the disturbance observer gain. The standard setting is "100" to "300".
To use the disturbance observer, also set SV037 (JL) and SV043 (OBS1).
When not using, set to "0".
0 to 500
(%)
F EDCBA98765 4 3 2 10
obshj lmc3 lmct
bit Meaning when "0" is set Meaning when "1" is set
7
obshj
Normal use Disturbance observer
High-load inertia compatible control
SV082
SSF5 Servo function
selection5
POINT
1. The estimated disturbance torque can be output to the D/A output even if the
disturbance observer gain is zero (OBS2 = 0), and the disturbance observer
is not functioning.
2. Sections where the machine is not moving smoothly can be estimated as
the disturbance.
3. The lost motion compensation must be readjusted when the disturbance
observer is started.
4. SV082/bit7 is the characteristics improvement function when load inertia is
large. SV082/bit7 can be set when load inertia is small, also.