



















5. Spindle Adjustment
5 - 40
(2) Adjusting the orientation deceleration control
[1] Polarity setting of sensor
Input the orientation command (ORC) when the machine is in the normal state. Confirm that the
operation stops at one point and the orientation complete signal (ORCF) turns ON even when
the operation is unstable. If the excessive error alarm (alarm 52) occurs, or if the operation does
not stop and repeats forward/reverse run at a low-speed when using the magnetic sensor
orientation specifications, change the value for SP097/bit5 or bit6. If the excessive error alarm
occurs even after changing this value, carry out step [3].
No. Abbr. Parameter name Details
FEDCBA98765 4 3 2 10
ostp orze ksft gchg ips2 zdir vg8x mdir fdir Oscl pyfx dmin odi2 odi1
bit Meaning when set to 0 Meaning when set to 1 Standard
5 fdir Spindle end detector polarity: + Spindle end detector polarity: – 0
6 mdir Magnetic sensor polarity: + Magnetic sensor polarity: – 0
SP097 SPECO* Orientation
specification
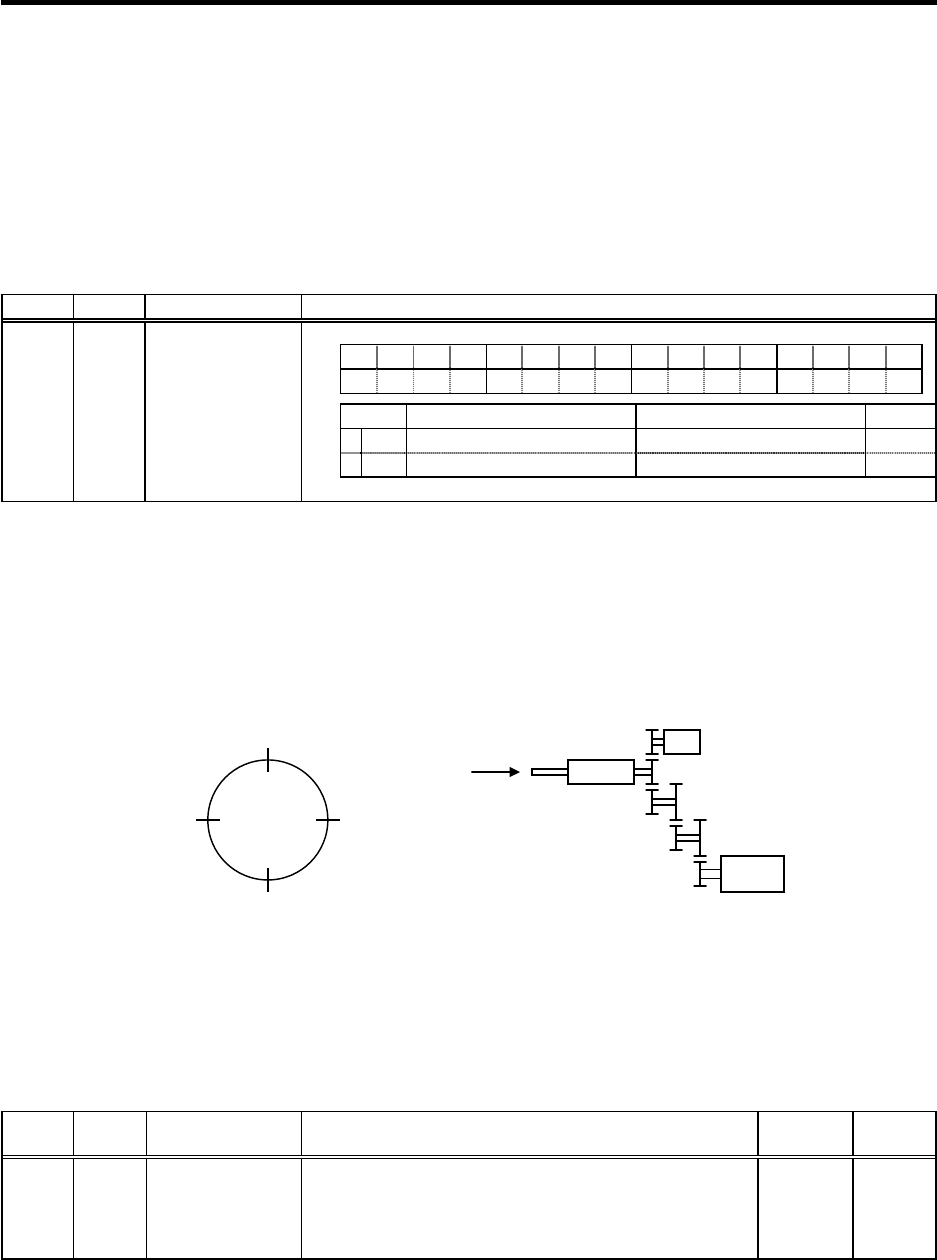
[2] Adjustment of orientation stop position
Next, adjust the in-position shift amount for orientation control: SP007 (OPST) so that the axis
stops at the target stop point. If the stop position command data is input from the spindle end
detector, or from an external source during motor PLG orientation, the operation will stop
according to the given data as shown in the drawing below regardless of the detector's
mounting direction. The 0° position shown below is the position shifted by SP007 (OPST).
Orientation stop position
(Note) The external stop position command data is read in at the rising edge of the orientation start, so
always change the value before inputting the orientation start command. Any changes to the value
will be invalid if made after orientation has started.
No. Abbr. Parameter name Details
Setting
range
Standard
SP007 OPST In-position shift
amount for
orientation
Set the stop position for orientation.
(1) Motor PLG, spindle end detector:
Set the value by dividing 360° by 4096.
(2) Magnetic sensor:
Divide –5° to +5° by 1024 and put 0° for 0.
(1) 0 to 4095
(2) -512 to
512
0
View S
0h
(0°)
400h
(90°)
800h
(180°)
C00h
(270°)
S
p
indle end detecto
r
XS
p
indle
Spindle motor
A
BC
DE
F
S