


















7. Diagnosis
7.10 Auxiliary Axis Monitor
I
-307
Item Display details
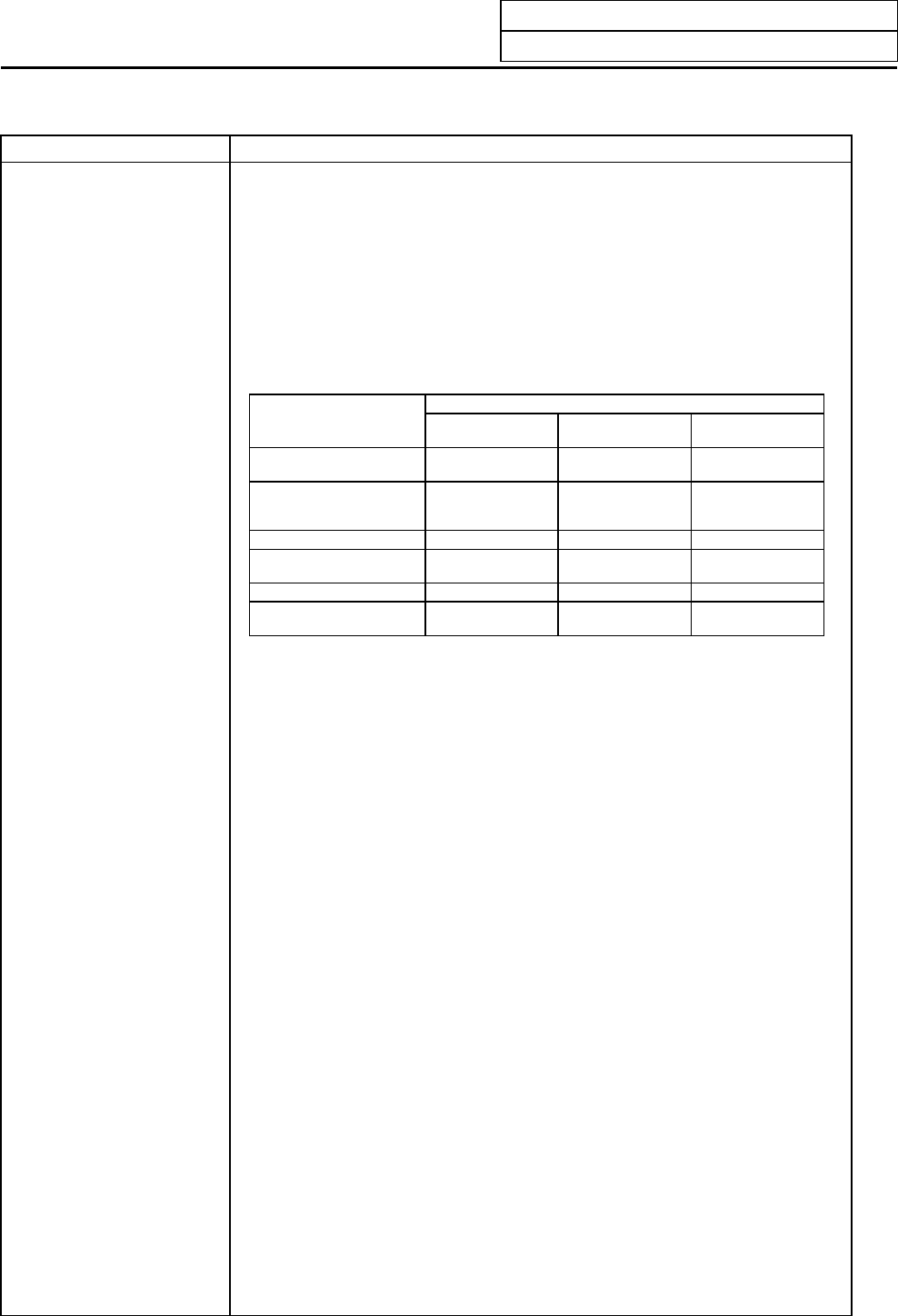
Initial The initialization method designated by the auxiliary axis parameter #120
ABS Type (ABSOLUTE POSITION DETECTION PARAMETER) is
displayed in the column to the right of the item.
(Display details of the initialization method)
Dog type : Dog-type method
Initial Stopper type : Stopper method
Initial Origin type : Marked point alignment method
The status at initialization is displayed in the column below the item.
(Display details of the initialization status)
ABSOLUTE VALUE DETECTION PARAMETER
MR-J2-CT status
Stopper method
Marked point
alignment method
Dog-type method
ABSOLUTE POSITION
LOSS
Illegality Illegality Illegality
EXECUTING ABSOLUTE
POSITION INITIALIZATION
ON
Pressing Origin type —
STOPPER Press Rel. — —
EXECUTING BASIC POINT
SETTING ON
— Ret. Ref. P —
ZERO POINT RETURN — — Zero-P.Ret
ABSOLUTE POSITION
ESTABLISHMENT
Completion Completion Completion
Explanation of display details
Completion : This is displayed when the absolute position of the
stopper, marked point alignment, or dog-type method
is established.
For the stopper and marked point alignment
methods, this shows that the grid has been reached,
and the initialization has been completed.
Illegality : This is displayed when the absolute position has
been lost in the stopper, marked point alignment, or
dog-type method.
Pressing : This is displayed during absolute position initialization
when the zero point is being initialized by the stopper
method.
This status continues until the stopper is reached.
Press Rel. : This status is entered once the stopper has been
reached, or when a fixed time has elapsed and the
current limit has been reached.
Ret.Ref.P. : This shows the status after the stopper, from the time
the stopper is released to the time immediately
before the axis reaches the grid after moving in the
opposite direction.
For the marked point alignment method, this
indicates the status when the tool is moving in the
basic point direction set in parameter #120 ABS Type
to a time just before the grid is reached.
Origin type : When the zero point is initialized by the marked point
alignment method, this indicates the status when the
tool is moving to the machine basic point from the
time during absolute position initialization, until the
basic point is designated.
Zero-P.Ret : This shows that the tool has returned to the zero
point by a dog-type method initialization.