



















4. Operation Mode
4.4 Return to Reference Position Mode
II-9
4.4 Return to Reference Position Mode
This mode enables a given controlled axis to be returned to the defined position unique to the machine
(reference position) manually.
The first return to reference position after the NC power is turned ON becomes the dog mode. In the second
or later return to reference position, the dog mode or high-speed return can be selected by setting a given
parameter.
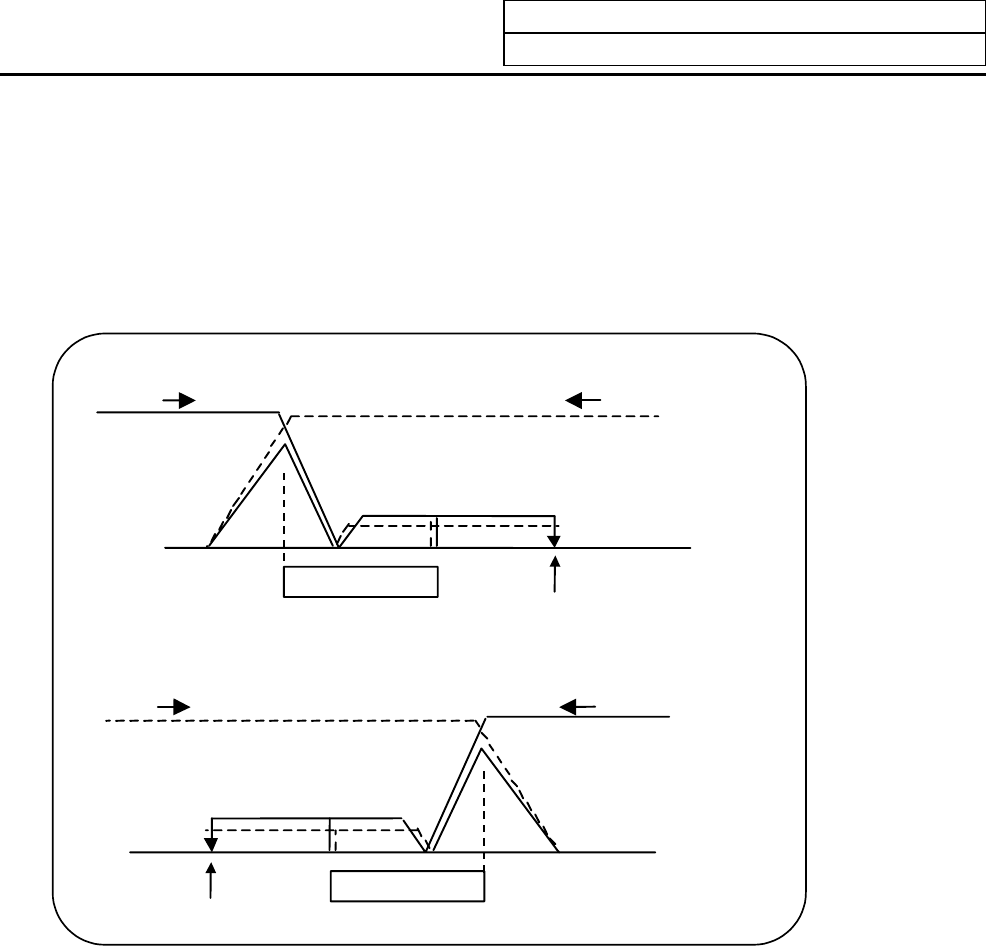
Patterns of return to reference position are shown below.
(–)
(+)
(–)
(+)
To move in + direction
To move in – direction
Dog
Reference point
When reference point return direction is positive (+)
To move in + direction
To move in – direction
Dog
Reference point
When reference point return direction is negative (–)
Dog mode return to reference position
The steps below describe what happens to the controlled axis when it returns to the reference point for the
first time with the power ON and with the machine in an "operations not ready state" (emergency stop is
engaged or the servo alarm is ON) or when the parameters are selected in the dog mode.
(1) The controlled axis is moved in the direction where the near point detection limit switch and dog
approach each other in the return to reference position mode.
(2) When the limit switch kicks the dog, the controlled axis once stops with deceleration.
(3) Next, the controlled axis moves to the reference position at the approach rate set in the parameter.
(4) When it arrives at the reference position, the reference position arrival signal is output.
High-speed return to reference position
If high-speed return is set in a given parameter after dog mode return to reference position is executed, then
high-speed return to reference position will be made.