



















4. Absolute Position Detection System
4.1 Outline
III-16
4. Absolute Position Detection System
4.1 Outline
By detecting the machine movement amount even when the power is turned OFF, the absolute position
detection function allows automatic operation without executing zero point return after the power is turned ON.
The reliability of this function is extremely high as it performs various data checks such as a mutual checks of
the feedback amount from the detector, and checks of the absolute position on the machine's characteristic
point.
The machine zero point must be determined and the absolute position established for the absolute position
detection function. The two following methods can be used depending on how the absolute position is
established.
(1) Dog-less type absolute position detection
The absolute position is established by setting a random coordinate on a random position without using
the dog.
The basic position can be determined with the following two methods in this method.
• Machine end stopper method
• Marked point alignment method
Manual initialization or automatic initialization can be used for the machine end stopper method.
(2) Dog type absolute position detection
The absolute position is established by executed dog type zero point return.
The validity of the absolute position detection system and the method can be set for each axis with
parameters. However, the servo amplifier and detector must have the absolute position detection
specifications.
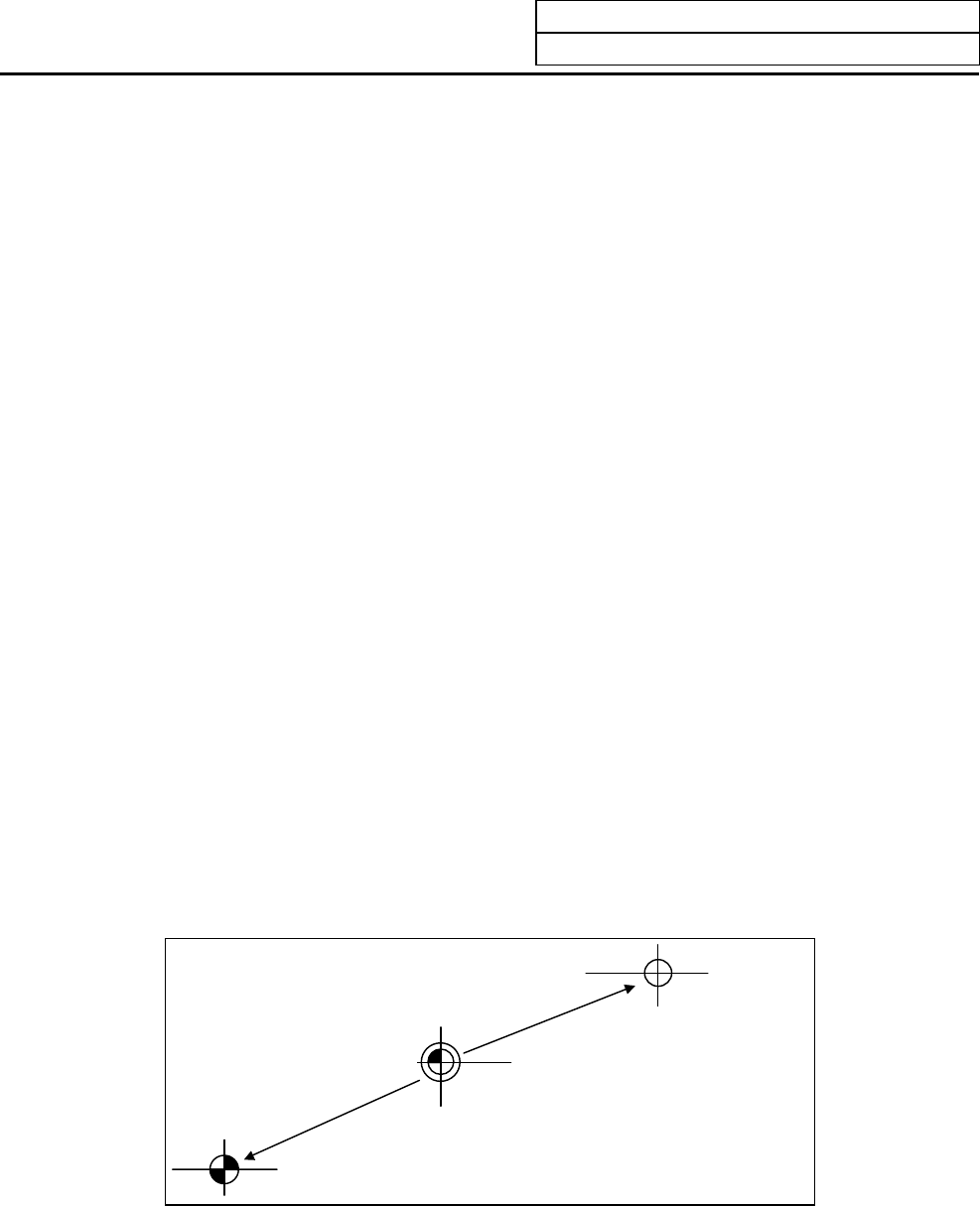
4.2 Coordinate System of Absolute Position System
The basic machine coordinate zero point is created at the mechanical basic position (machine end or basic
point) or at the position determined by inverting the sign of the "ZERO" parameter using the electric basic
position (grid point just before the machine end or basic point) as the absolute position basic point. The
reference point is created at the position of the "G53ofs" parameter using the zero point of the basic
machine coordinate.
Reference point
G53ofs
Basic machine coordinate system
"ZERO"
A
bsolute position
basic point
Fig. 2.2 Absolute position (dogless setting system)
"ZERO" : Coordinate value of the absolute position basic position looking from the basic machine
coordinate zero point. ([ABS. POSITION SET] "#2 ZERO")
"G53ofs" : Coordinate value of the reference point looking from the basic machine coordinate zero point.
([AXIS SPEC] "#2037 G53ofs")
(Note) Select whether to use the machine basic position or electrical basic position as the absolute position
basic point with parameter "#2059 zerbas".