



















3. Adjustment of Dog-type Reference Point Return
3.3 Reference Point Return Parameters
III-10
3.3 Reference Point Return Parameters
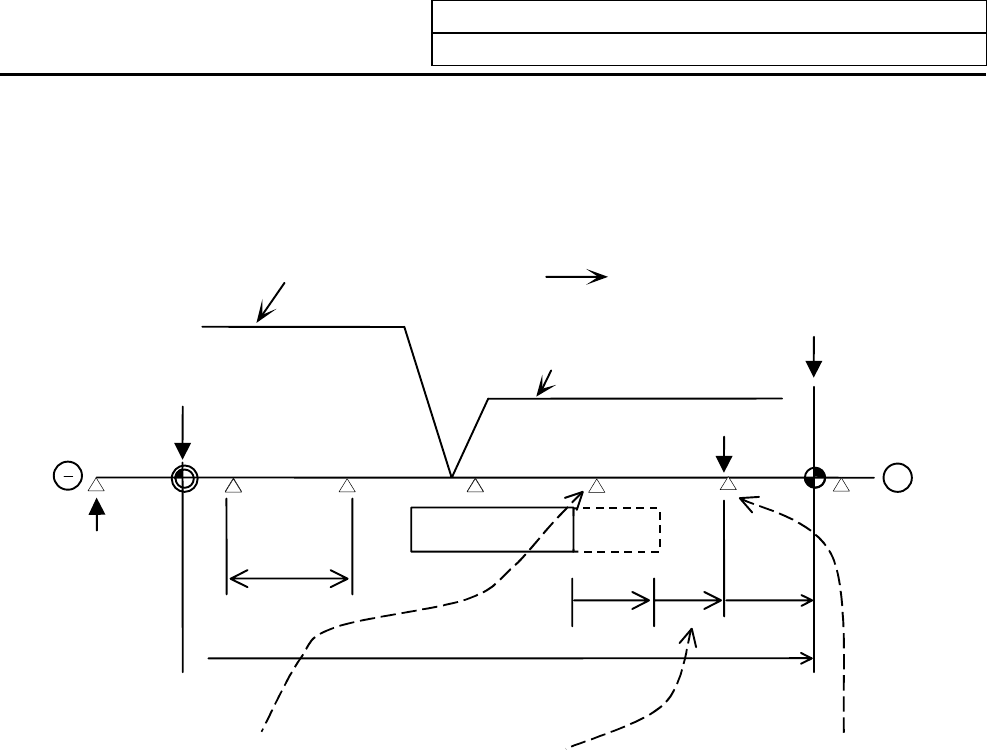
(1) Reference point return operation and parameter related drawing
+
#2025 G28rap
G28 rapid traverse rate
#2030 dir (
−
) Reference point return direction
Reference point
(Position returned to with the
zero point return command)
#2026 G28crp G28 approach speed
Basic machine coordinate
system zero point
Electrical zero point
Grid point
#2029 grspc
Grid space
Near-point dog
#2037 G53ofs Machine zero point offset
Grid mask
Grid mask
amount
Grid amount
Reference
point shift
amount
The grid between the near-poin
t
dog and grid mask is not the
electrical zero point.
The first grid at the end of
the grid mask is the
electrical zero point.
The grid amount is displayed on
the "ALM/DIAG" "SERVO
MONITOR (2)" screen.
#2027
G28sft
#2028
grmask
(2) G28 rapid traverse rate (#2025 G28rap)
This parameter designates the feedrate for dog-type reference point return in manual operation and
automatic operation.
The feedrate during high-speed reference point return will be the rapid traverse rate (SETUP PARAM.
"#2001 rapid").
(3) G28 approach speed (#2026 G28crp)
This parameter sets the approach speed to the reference point after decelerating to a stop by the
near-dog detection. The G28 approach speed is accelerated and decelerated in steps
(acceleration/deceleration zero), so if the speed is fast, mechanical shock, etc., could occur. The G28
approach speed should be set between 100 and 300 mm/min., and within 500 mm/min. at the fastest.
(4) Reference point shift amount (#2027 G28sft)
This parameter can set the shift amount for shifting the reference point from the electrical zero point.
The shift direction can be set only in the reference point return direction.
If the reference point shift amount is "0", the grid point (electrical zero point) will be the reference point.