



















6. Operation Panel Switch Functions
6.16 Deceleration Check
II-32
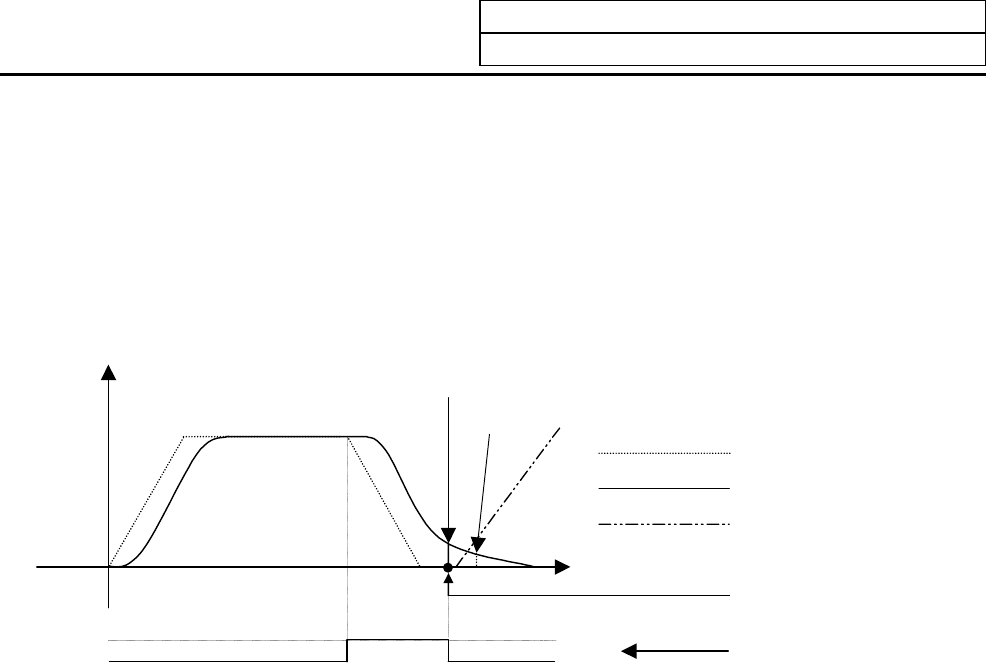
(2) In-position check
When the in-position check is valid, the command deceleration check is carried out. After that, it is
confirmed that the servo system positional error is less than the parameter setting value, and the next
block is executed.
The in-position check width can be designated with the servo parameter in-position width (SV024).
However, G0 and G1 can be designated independently with the axis specification parameter G0
in-position check width (G0inps) and G1 in-position check width (G1inps). If both the servo parameter
and axis specification parameter are set, the larger value will have the priority.
Speed
G0inps (G1inps)
SV024
Time
Command to motor
Motor speed
Next block command
Judge completion of
deceleration with G0inps
(G1inps) setting value
Deceleration check signal
ON
OFF
If the SV024 setting value is larger, in-position check will end when the SV024 setting value is
established.