



















3. Adjustment of Dog-type Reference Point Return
3.1 Outline
III-8
3. Adjustment of Dog-type Reference Point Return
3.1 Outline
The relative position detection and absolute position detection type position detection systems are available.
The methods of returning to the reference point include the dog-type reference point return and the
dogless-type reference point return.
The method of adjusting the dog-type reference point return using the relative position detection is
described in this section. Refer to the section "4. Absolute Position Detection System" for details on
adjusting the absolute position detection.
3.2 Dog-type Reference Point Return
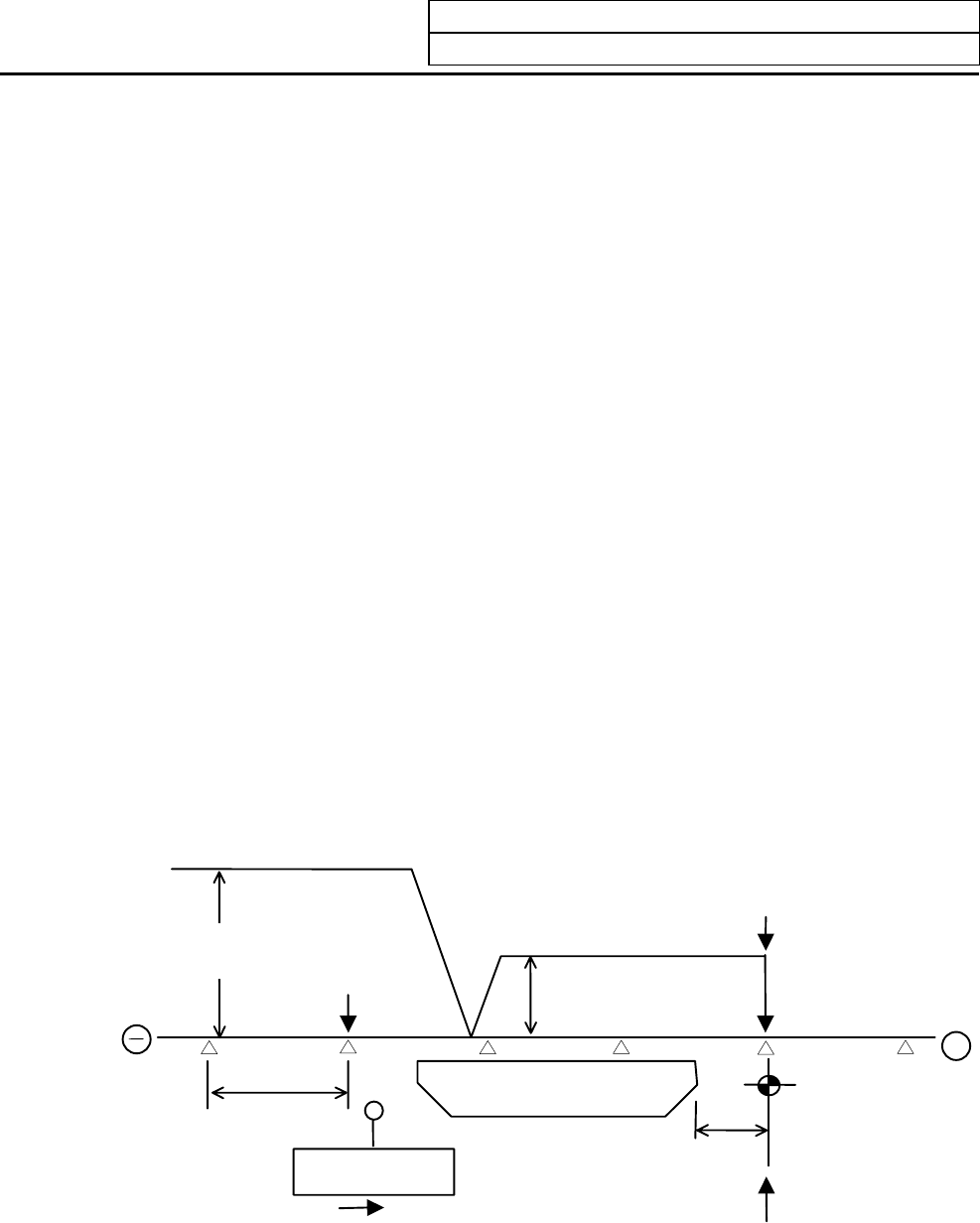
(1) Reference point return operation
When the dog-type reference point return is executed, the machine will move at the commanded speed.
When the near-point detection limit switch kicks the near-point dog (when the near-point detection
signal turns OFF), the machine decelerates to a stop. After decelerating to a stop, the machine moves
at the G28 approach speed, and positions to the first grid point after leaving the near-point dog.
This grid point is called the electrical zero point. Normally, this electrical zero point position is the
reference point.
For the reference point return using the relative position detector, the first return after turning the power
ON is carried out with the dog-type reference point return. The second and following returns are carried
out with high-speed reference point return. High-speed reference point return is a function that directly
positions to the reference point saved in the memory without decelerating at the near-point dog.
If reference point return has not been executed even once after turning ON the power while using relative
position detection, the program error (P430) will occur when movement commands other than G28 are
executed.
+
Near-point detection
limit switch
Reference point return direction
G28 Rapid traverse rate
(#2025 G28rap)
G28 approach speed
(#2026 G28crp)
Grid space
Near-point dog
Grid amount
Electrical zero point
Reference point
Grid point