



















4. Absolute Position Detection System
4.3 Starting up Absolute Position Detection System
III-21
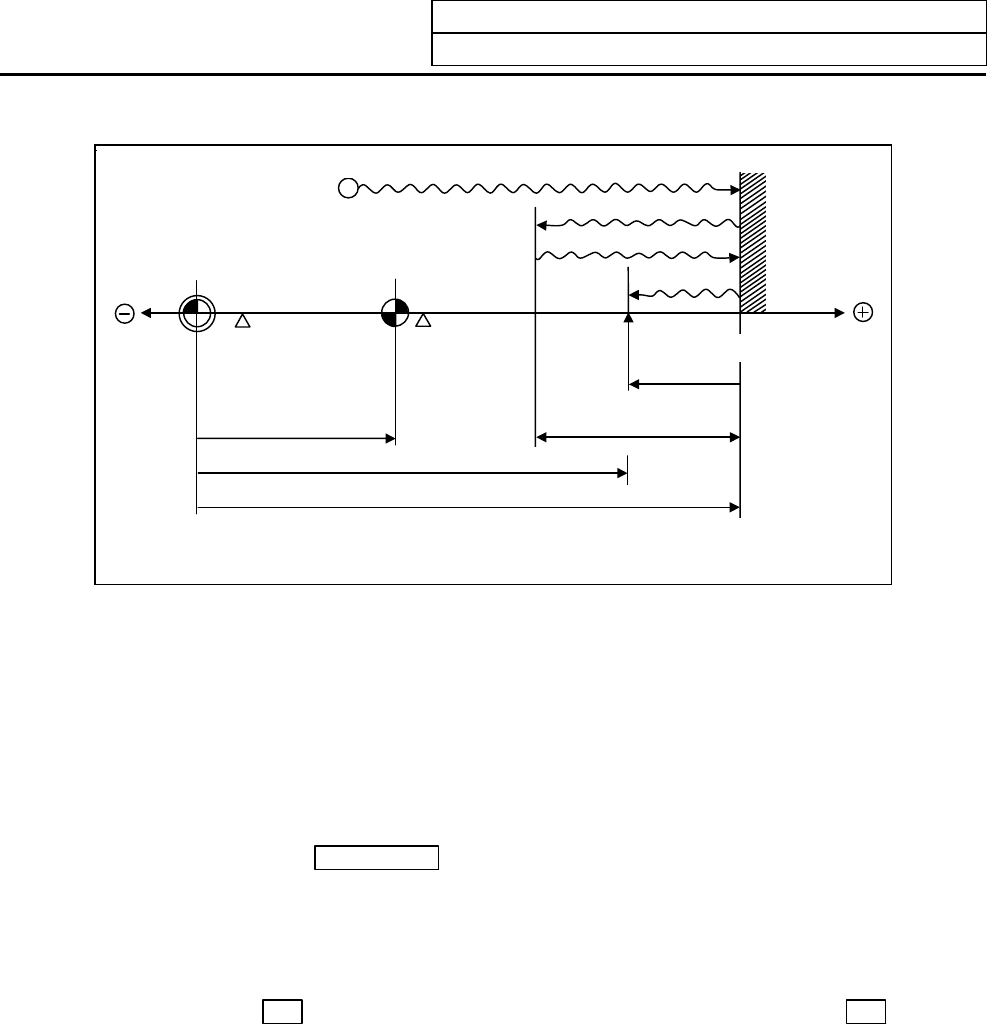
Zero point of basic
machine coordinate
Reference
point
Zero-return parameter
"#2037 G53ofs"
Machine end
stopper
(Machine basic
position)
"#2 ZERO" (#2059 zerbas=1)
"#2 ZERO" (#2059 zerbas=0)
Grid point
(Electrical basic position)
"TO END"
A
bsolute position parameter
"#2056 aproch"
•
a) to e) in the drawing corresponding to the sub-sections given in operation procedure
(7) (automatic operation).
•
Select either "#2 ZERO" with the parameters.
A
utomatic initialization start point
Press-fit speed
a)
b)
c)
d)
e)
Automatic zero-point initialization
(Note 1) When the approach point is reached after the first press-fit, if the grid has not been passed once
after turning the power ON, the message "NOT PASS" will display. Return to a point before the
last grid, and then repeat from step 6.
(Note 2) Acceleration/deceleration during movement at the specified press-fit speed is performed in
smoothing-off (step feed) mode.
(Note 3) If 0 is specified for "#2056 aproch" of the [ABS. POSI PARAM] screen, the machine zero point
becomes the approach point.
(Note 4) Automatic initialization is interrupted if one of the following events occurs. If it is interrupted,
"STATE" indicates JOG-START
(after selection of the "INIT-SET" if it is caused by mode
change), so restart operation from step 6.
• An absolute position detection alarm occurs.
• Operation preparation turns OFF.
• The mode is changed.
• The system is reset.
If "STATE" is OK
before automatic initialization is started, "STATE" returns to OK if power is
turned OFF and ON again without restarting the operation.
(Note 5) If the first grid point is covered by the grid mask ("#2028 grmask" on [ZERO-RTN PARAM]
screen) as a result of marked point return at step 7 e), the axis stops at the next grid point.
Note that zero-point shift ("#2027 G28sft" on [ZERO-RTN PARAM] screen) is invalid.